 Nieuws
Nieuws
Het verschil tussen RTK en ppk
UAV's worden veel gebruikt, met lage kosten, multi-tasking, goede manoeuvreerbaarheid, hoge efficiëntie en lage straling. Zij worden veel gebruikt in alle aspecten van militaire en civiele productie.
Omdat gps heeft de kenmerken van alle weersomstandigheden, hoge precisie en automatische meting, de UAV's die momenteel worden gebruikt voor landmeten en in kaart brengen, gebruiken in principe gps voor positionering en navigatie. De gps single-point positioneringsnauwkeurigheid van UAV vluchtcontrole is te arm. Voorheen werd een groot aantal beeldcontrolepunten gebruikt om beeld vervorming te corrigeren
In sommige speciale terreinen (zoals bergen, valleien, rivieren, enz.), Is het echter moeilijk voor veldpersoneel om beeldcontrolepunten in te zetten. om de werkdruk te verminderen, zijn de meeste beeldcontrolepunten niet eens nodig, en is het nodig om de positioneringsnauwkeurigheid van het vliegtuig te verbeteren, RTK technologie en ppk-technologie kunnen centimeter-niveau bereiken nauwkeurigheid.
hieronder beginnen we van de twee technische principes van RTK en PPK, en voer een vergelijkende analyse uit om een geschiktere methode voor gps air positionering te vinden
1. Het werkingsprincipe van RTK

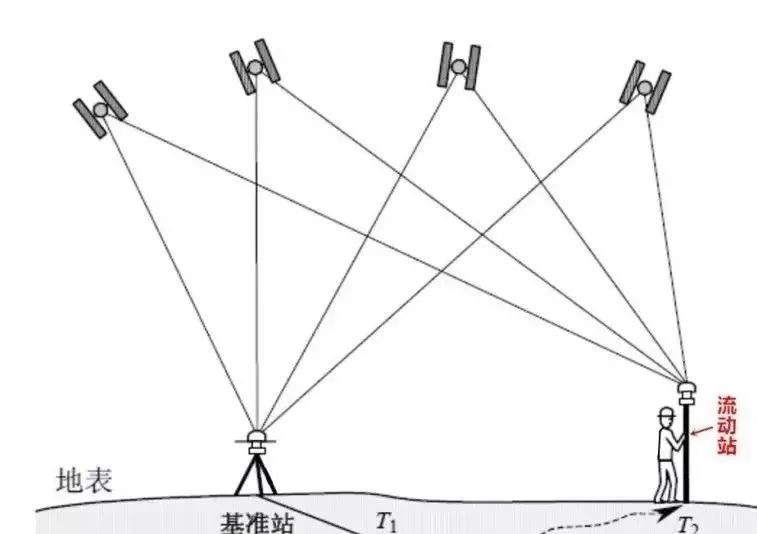
RTK (real-time beweging) meetsysteem bestaat meestal uit drie onderdelen: gps ontvangenapparatuur, datatransmissiesysteem en softwaresysteem voor dynamische meting. De RTK meettechniek is gebaseerd op de waarneming van de draaggolffase en heeft een snelle en hoge precisie positionering functie. De technologie voor het meten van de faseverschillen van de draaggolf kan real-time driedimensionale positioneringsresultaten van het meetstation in het gespecificeerde coördinatensysteem verkrijgen, en heeft centimeter-niveau positionering nauwkeurigheid.
Het werkingsprincipe van RTK meting is: plaats een ontvanger op het basisstation en plaats de andere ontvanger op de drager (genaamd het mobiele station). Het basisstation en het mobiele station ontvangen gelijktijdig signalen die door dezelfde gps satelliet worden verzonden De verkregen waarnemingswaarde wordt vergeleken met de bekende positie-informatie om de gps differentiële correctiewaarde te verkrijgen Vervolgens wordt de correctiewaarde via naar het mobiele station van de openbare satelliet verzonden het radiodatalinkstation op tijd om zijn gps-waarnemingswaarde te verfijnen om een nauwkeurigere real-time positie van het mobiele station te verkrijgen na de differentiële correctie
momenteel de nauwkeurigheid van het positioneringsvlak van de reguliere fabrikant RTK kan 8mm bereiken + 1ppm, en de hoogtenauwkeurigheid kan 15 mm bereiken + 1ppm. er zijn twee hoofdcommunicatiemethoden tussen basisstation en mobiel station: radiostation en netwerk. Het signaal van het radiostation is stabiel en de transmissieafstand van het netwerksignaal is lang, en elk heeft zijn eigen voordelen.
Ten tweede, het werkingsprincipe van ppk
Het werkingsprincipe van ppk (nabewerking kinematica, gps dynamisch nabewerking differentieel) technologie is om basisstationontvangers te gebruiken voor gelijktijdige observatie, en ten minste één mobiele ontvanger voor gelijktijdige observatie van gps satellieten. met andere woorden, het basisstation blijft continu. na het observeren van de initialisatie, gaat de rover naar het volgende te bepalen punt, en het is noodzakelijk om continu de satelliet tijdens de verplaatsing om de ambiguïteit van de satelliet de hele week tot de geplande tijd.
De gegevens die tegelijkertijd door het referentiestation en de rover worden ontvangen, worden lineair in de computer gecombineerd om een waarnemingswaarde voor de virtuele draaggolffase te vormen om de relatieve positie tussen de ontvangers te bepalen. Ten slotte worden de bekende coördinaten van het referentiestation ingevoerd om de driedimensionale coördinaten van de rover te verkrijgen
ppk-technologie is de vroegste dynamische differentiële gps-technologie (ook bekend als semi-dynamische methode quasi-dynamische relatieve positioneringsmethode stop-and-go methode). Het belangrijkste verschil tussen het en RTK technologie is dat het realtime datatransmissie tot stand brengt op basisstations en roverstations ( zoals RTK), maar na de positioneringswaarneming zullen de positioneringsgegevens die zijn verzameld door de twee gps-ontvangers na de meting gezamenlijk worden verwerkt om de coördinaat te berekenen positie van het mobiele station op de corresponderende tijd De rover is niet strikt beperkt. de voordelen zijn een hoge positioneringsnauwkeurigheid, hoge werkefficiëntie, grote werkradius en eenvoudige bediening
3. vergelijking van RTK en ppk
overeenkomsten tussen RTK en ppk
1. De bedieningsmodus is hetzelfde. beide technologieën gebruiken de werkingsmodus van referentiestation plus rover.
2. beide technologieën moeten worden geïnitialiseerd voordat operatie.
3. beide kunnen centimeter-niveau bereiken nauwkeurigheid.
Het verschil tussen RTK en ppk
1. verschillende communicatiemethoden. RTK technologie vereist een radiostation of netwerk om differentiële gegevens te verzenden ppk-technologie vereist geen ondersteuning van communicatietechnologie en kan statische gegevens opnemen
2. verschillende positioneringsmethoden. De real-time positioneringstechnologie die wordt gebruikt door RTK stelt u in staat de coördinaten en nauwkeurigheid van het meetpunt op de rover op elk moment te bekijken; ppk-positionering is een nabewerking positionering en de coördinaten van het punt kan te zien op site. het heeft nabewerking nodig om de resultaten te zien.
3. De werkradius is anders. RTK werking wordt beperkt door het communicatiestation De werkafstand is doorgaans niet meer dan 10 km. De netwerkmodus heeft het gebied nodig dat wordt gedekt door het netwerk signaal met behulp van ppk-technologie kan de algemene actieradius 50 km bereiken
4. De mate van invloed van satellietsignalen is verschillend. in het proces van RTK bediening, als het zich in de buurt van een obstakel zoals een grote boom bevindt, is het gemakkelijk om de lock; te verliezen terwijl het in de ppk-bewerking meestal niet gemakkelijk is om de vergrendeling te verliezen na initialisatie.
5. verschillende positionering nauwkeurigheid. RTK vlak nauwkeurigheid 8mm + 1ppm, hoogtenauwkeurigheid 15 mm + 1ppm PPK-vlaknauwkeurigheid 2,5 mm + 0,5 ppm, hoogtenauwkeurigheid 5 mm + 0,5 ppm.
6. verschillende positionering frequenties. De frequentie waarmee de RTK basisstation verzendt differentiële gegevens en het mobiele station ontvangt over het algemeen 1-2 HZ, en de maximale positioneringsfrequentie van ppk kan 50HZ. Bereiken
vergelijkende analyse:
1. De vliegsnelheid van drones in de lucht is erg hoog en vereist een hoge positionering frequentie. real-time navigatie van RTK technologie is moeilijk om deze voorwaarde te bereiken ppk ondersteunt 50HZ positioneringsfrequentie, die volledig kan voldoen aan de demand.
2. RTK biedt real-time locatie informatie. ppk kan epoch-gegevens in een bepaalde periode oplossen via post-processing. niet alleen kan de vaste snelheid worden verhoogd, maar de nauwkeurigheid van de resolutie is hoger.
3. RTK vereist een radio- of netwerkcommunicatiemodule, maar ppk niet, wat de last van drones kan verminderen en de levensduur van het vliegtuig kan verlengen.
4. De rijafstand van RTK is beperkt, en de rijafstand van ppk kan oplopen tot 50km. in langeafstands- en grootschalige operatiegebieden, met name gordelgebieden, zoals hoogspanningsleidingen, wegen, spoorwegen, olie- en gaspijpleidingen, is ppk de beste keuze.
Vier, om samen te vatten
Hoewel RTK kan hoge precisie bieden locatie-informatie in realtime, er zijn momenteel grote technische problemen bij de toepassing van UAV's. Het grootste voordeel van ppkover RTK is dat het achteraf kan worden verwerkt en omgekeerd kan worden gefilterd (reverse Kalman filter), wat het probleem kan oplossen dat sommige satellieten de vergrendeling verliezen, en de positioneringsnauwkeurigheid kan verbeteren door fusie en reverse.
ppk-technologie is een ruimtelijke positionering technologie. Met de ontwikkeling van technologie, het is meer geschikt voor installatie op drones. UAV technologie wordt steeds meer volwassen. grootschalige operaties zijn efficiënter dan traditioneel RTK metingen. ppk-technologie heeft uiteraard brede ontwikkelingsperspectieven op het gebied van drones. ppk-technologie zal zeker de ruggengraat worden van drones in landmeetkunde en mapping.
Wellhope draadloze fabricage gebaseerd in 5G 4G; MIMO; GNSS drone antenne ; GSM; 3G; Wlan; LTE antenne en rf-pigtail kabel; meer vraag of informeer gerust stuur ons e-mail; wh@wellhope-wireless.com.